With surgical interventions becoming more and more complex, there is an increasing need for image guidance solutions in the OR. While X-ray systems expose the surgical staff to significant ionizing radiation, and the usage of bulky MRI scanners is regularly not feasible, ultrasound (US) systems could offer a practical and economic solution. However, ultrasound imaging is less straight-forward in terms of manual handling of the transducer and the achievable image quality, and therefore highly depends on the experience and the dexterity of the operating physician. We believe that automatic robotic support for image-guided navigation can overcome these challenges in the operating theater.
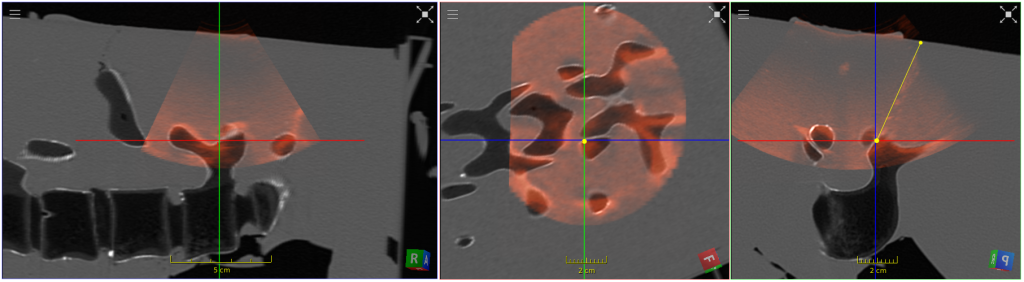
Interventional robotic 3D ultrasound acquisition of a spine phantom (red) registered with CT image for interventional guidance, e.g. facet joint needle insertion.
In this project, we are investigating ways to perform automatic robotic US acquisitions, including automatic trajectory planning for optimal organ coverage, trajectory execution with force control for sufficient acoustic coupling, 3D compounding, automatic needle guidance and inseration, as well as visual servoing-inspired control laws to track both moving anatomy and moving tools and to update the trajectory in real-time.
Internal torque sensors of the robot and force control schemes allow safe ultrasound acquisitions.
Update: First results of an ongoing clinical study (see publication below) demonstrate that robotic ultrasound-assisted facet joint insertions lead to success rates comparable to current clinical practice while lowering the X-ray dose and offering additional anatomical context for needle trajectory planning.
@article{esteban2018ipcai,
title = {Robotic ultrasound-guided facet joint insertion},
author = {Javier Esteban and Walter Simson and Sebastian Requena Witzig and Anna Rienmüller and Salvatore Virga and Benjamin Frisch and Oliver Zettinig and Drazen Sakara and Yu-Mi Ryang and Nassir Navab and Christoph Hennersperger},
doi = {10.1007/s11548-018-1759-x},
year = {2018},
date = {2018-01-01},
journal = {International Journal of Computer Assisted Radiology and Surgery},
volume = {13},
number = {6},
pages = {895--904},
publisher = {Springer Berlin Heidelberg},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
@article{kojcev2017ipcai,
title = {On the Reproducibility of Expert-Operated and Robotic Ultrasound Acquisitions},
author = {Risto Kojcev and Ashkan Khakzar and Bernhard Fuerst and Oliver Zettinig and Carole Fakhry and Robert DeJong and Jeremy Richmon and Russell Taylor and Edoardo Sinibaldi and Nassir Navab},
doi = {10.1007/s11548-017-1561-1},
year = {2017},
date = {2017-01-01},
journal = {International Journal of Computer Assisted Radiology and Surgery},
volume = {12},
number = {6},
pages = {1003--1011},
publisher = {Springer Berlin Heidelberg},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
@article{hennersperger2016tmi,
title = {Towards MRI-Based Autonomous Robotic US Acquisitions: A First Feasibility Study},
author = {Christoph Hennersperger and Bernhard Fuerst and Salvatore Virga and Oliver Zettinig and Benjamin Frisch and Thomas Neff and Nassir Navab},
url = {https://www.zettinig.eu/down/hennersperger2016tmi.pdf},
doi = {10.1109/TMI.2016.2620723},
year = {2017},
date = {2017-01-01},
journal = {IEEE Transactions on Medical Imaging},
volume = {36},
number = {2},
pages = {538--548},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
@article{zettinig2017spine,
title = {3D Ultrasound Registration-based Visual Servoing for Neurosurgical Navigation},
author = {Oliver Zettinig and Benjamin Frisch and Salvatore Virga and Marco Esposito and Anna Rienmüller and Bernhard Meyer and Christoph Hennersperger and Yu-Mi Ryang and Nassir Navab},
url = {https://www.zettinig.eu/down/zettinig2017ijcars.pdf},
doi = {10.1007/s11548-017-1536-2},
year = {2017},
date = {2017-01-01},
journal = {International Journal of Computer Assisted Radiology and Surgery},
volume = {12},
number = {9},
pages = {1607--1619},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
@article{kojcev2016dualrobot,
title = {Dual-Robot Ultrasound-Guided Needle Placement: Closing the Planning-Imaging-Action Loop},
author = {Risto Kojcev and Bernhard Fuerst and Oliver Zettinig and Javad Fotouhi and Sing Chun Lee and Benjamin Frisch and Russell Taylor and Edoardo Sinibaldi and Nassir Navab},
url = {https://www.zettinig.eu/down/kojcev2016ipcai.pdf},
doi = {10.1007/s11548-016-1408-1},
year = {2016},
date = {2016-06-01},
booktitle = {International Conference on Information Processing in Computer-Assisted
Interventions (IPCAI)},
journal = {International Journal of Computer Assisted Radiology and Surgery},
volume = {11},
number = {6},
pages = {1173--1181},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
@inproceedings{virga2016,
title = {Automatic Force-Compliant Robotic Ultrasound Screening of Abdominal Aortic Aneurysms},
author = {Salvatore Virga and Oliver Zettinig and Marco Esposito and Karin Pfister and Benjamin Frisch and Thomas Neff and Nassir Navab and Christoph Hennersperger},
url = {https://www.zettinig.eu/down/virga2016iros.pdf},
doi = {10.1109/IROS.2016.7759101},
year = {2016},
date = {2016-01-01},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {508--513},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{frisch2016rsna,
title = {Collaborative Robotic Ultrasound: Towards Clinical Application},
author = {Benjamin Frisch and Oliver Zettinig and Bernhard Fuerst and Salvatore Virga and Christoph Hennersperger and Nassir Navab},
url = {http://archive.rsna.org/2016/16005047.html
http://campar.in.tum.de/pub/frisch2016RSNA/frisch2016RSNA.pdf
},
year = {2016},
date = {2016-01-01},
booktitle = {Radiological Society of North America (RSNA) Annual Meeting},
pages = {SSM12-04},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{zettinig2016icra,
title = {Toward Real-time 3D Ultrasound Registration-based Visual Servoing for Interventional Navigation},
author = {Oliver Zettinig and Bernhard Fuerst and Risto Kojcev and Marco Esposito and Mehrdad Salehi and Wolfgang Wein and Julia Rackerseder and Edoardo Sinibaldi and Benjamin Frisch and Nassir Navab},
url = {https://www.zettinig.eu/down/zettinig2016icra.pdf},
doi = {10.1109/ICRA.2016.7487226},
year = {2016},
date = {2016-01-01},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
pages = {945--950},
organization = {IEEE},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}